Configure Now
Articulos en tu carro de compras0
0Articulos en tu carro de compras
Comienza a creando su paqueteCompra Ahora
Los sistemas de sonar tienen muchas aplicaciones. Esta guía explica todo lo que necesitas saber sobre los sistemas de sonar, incluido el uso de sonar para inspecciones de túneles, misiones de búsqueda y recuperación y más.
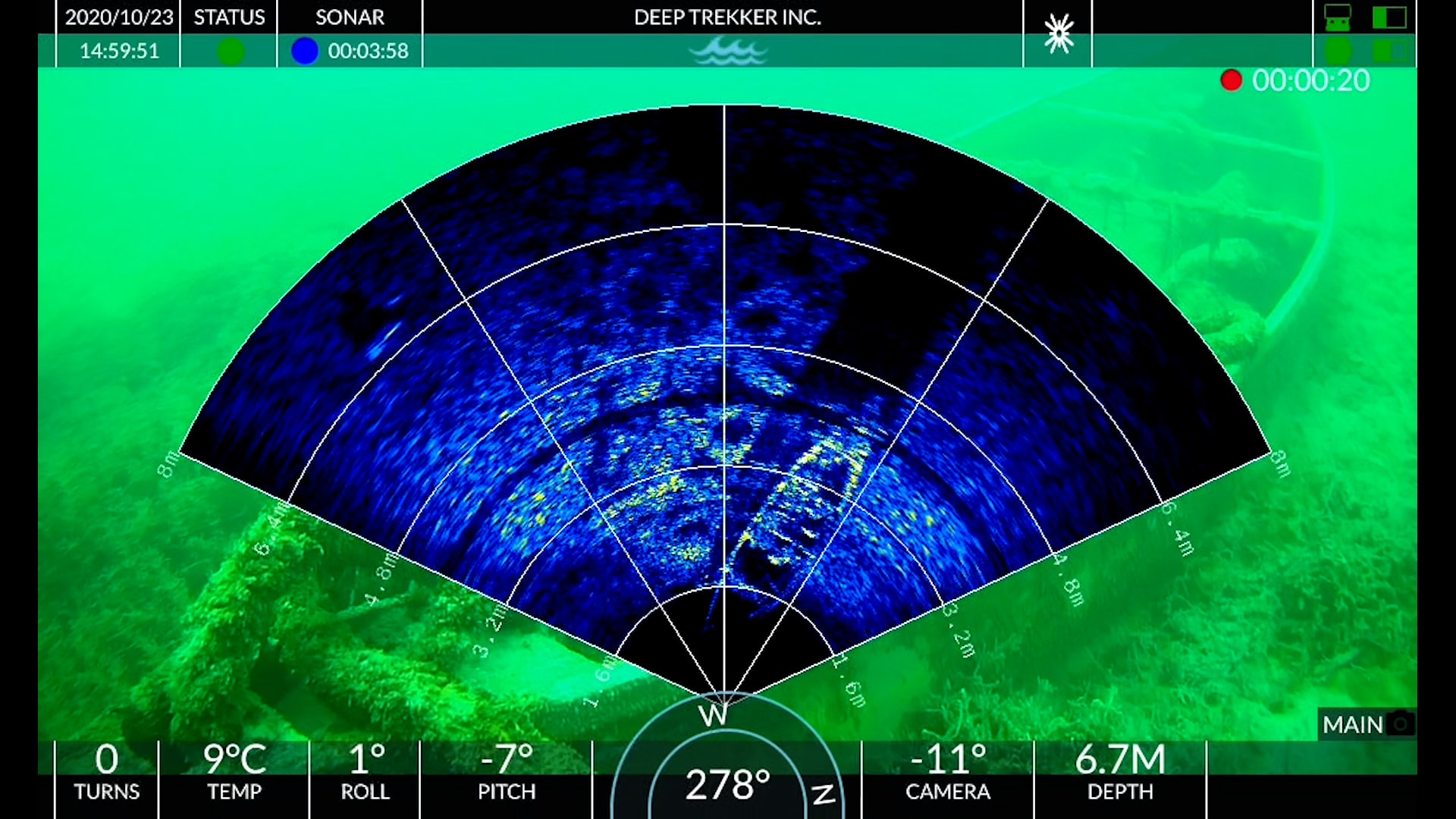
El video de arriba es un ejemplo de cómo el sonar puede ayudar con la identificación de objetivos submarinos y la navegación hacia ellos. El sonar es a menudo la herramienta favorita en el juego de herramientas para aquellos que trabajan bajo el agua. El uso del sonar es más un arte que una ciencia en muchos casos, por lo que puede ser frustrante para quienes se exponen inicialmente a él. Sin embargo, es una opción poderosa, ya que puede proporcionar información de posición, contexto para el entorno que lo rodea y capacidades de imagen incluso en las aguas más turbias.
Hay diferentes tipos de sensores que utilizan tecnología acústica:
Todas estas tecnologías sirven para diferentes propósitos. Este artículo se centra en cómo los sonares ayudan con las inspecciones y estudios submarinos
Los sonares ayudan con:
Las aplicaciones submarinas para el sónar incluyen:
Dado que el GPS no funciona bajo el agua y obtener imágenes de buena calidad con solo una cámara puede ser un desafío, especialmente en aguas turbias, el sonar es una tecnología excelente para que cualquiera que trabaje bajo el agua la entienda y la utilice.
SONAR (abreviatura de Sound Navigation and Range) es un método mediante el cual se utilizan ondas de sonido para localizar/trazar mapas de objetos y paisajes en el entorno. En esencia, un grupo de ondas de sonido se dirige hacia cualquier entorno. Mientras que algunas ondas rebotan en los objetos, otras se reflejan hacia el emisor.
Por ejemplo, si va a insertar un tubo en el mar abierto y sostener el otro extremo hasta la oreja, definitivamente será un espectáculo digno de ver. Sin embargo, podrás escuchar los sonidos de los animales abajo y el gemido de los barcos a lo lejos.
A menudo se promociona que Leonardo Da Vinci fue el primero en descubrir este fenómeno, pero no se puede demostrar que sea cierto. El método detrás de SONAR no fue invitado recientemente por humanos, ha sido utilizado como una función natural de la vida por ballenas, murciélagos y otros animales durante millones de años.
Con la comprensión del tiempo transcurrido y la velocidad del sonido antes de que regrese la onda, el receptor puede evaluar la distancia del objeto al emisor. Aunque SONAR funciona al aire libre, es más eficaz bajo el agua. Esto tiene que ver con el hecho de que el sonido viaja más lejos en el agua.
Con el potencial de SONAR, las ballenas pueden discernir el movimiento y la forma de objetos del tamaño de rocas a más de 60 pies de distancia. De hecho, De hecho, las ballenas confían más en SONAR que en sus parientes, su alimento o su vista.
Un sistema de sonar activo constará de una pantalla, un transductor, un transmisor y un receptor. Un impulso se transmite directamente desde ese transmisor y se transmuta en una onda de sonido por el transductor. Cuando la onda golpea un objeto, el sonido rebota.
Luego, el eco regresa al transductor, que transmuta el sonido en un impulso eléctrico amplificado por el receptor. Estos datos luego se envían a la pantalla. A veces, el transductor ayuda a detectar ondas de sonido y también a transmitirlas.
¿Cómo se detecta la fuente de sonido y se calcula la distancia del objeto desde el origen? Usando una multitud de sensores de hidrófono, los sistemas SONAR registran la intensidad del sonido y la fase cuando cada pulso golpea un sensor. La fase es el retraso de tiempo que se produce al recibir la onda de sonido. El sensor que registra la mayor amplitud y tiene la menor fase es el más cercano al punto de reflexión.
Otro factor importante en el rendimiento de SONAR es el entorno de uso. El rendimiento de los sistemas SONAR es variable según el entorno del océano, que a veces es impredecible. Los estudios oceánicos periódicos son fundamentales para que los modelos de propagación acústica garanticen una estimación precisa de los rangos.
Por ejemplo, uno de los desafíos en SONAR es la dispersión. Este fenómeno ocurre a partir de pequeños objetos en el cuerpo de agua desde la profundidad del fondo hasta la altura de la superficie. Al igual que la luz se dispersa de la luz en la niebla, lo mismo se aplica de manera similar a esta interferencia del agua.
Hable con nosotros sobre qué sistemas de SONAR ROV es mejor para su aplicación
En algún momento, los humanos han desarrollado SONAR con resoluciones y alcance superiores. Los sistemas SONAR más simples consisten en nuestros oídos y laringe. Es el mismo sistema que usamos cuando gritamos en la cima de una montaña y escuchamos nuestro eco.
Sin embargo, el SONAR desarrollado por los militares puede viajar miles de millas. El rango de barrido permite que el sistema cubra el 80% de los fondos oceánicos a partir de ondas de sonido que utilizan solo 4 puntos de vista.
A pesar de la eficacia de la luz y la velocidad superior de RADAR solo SONAR ayuda a crear mapas del fondo marino, desarrollar cartas náuticas, predecir peligros y descubrir naufragios.
De hecho, la patente SONAR había experimentado sanciones después de los eventos del Titanic. El propósito del SONAR era y es identificar objetos bajo la superficie que podrían resultar un desafío para los barcos. Además, las Guerras Mundiales trajeron serios avances que impulsaron la importancia de los submarinos de guerra y la vigilancia submarina. A partir de este avance, surgieron dos tipos principales de sonar; activo y pasivo.
El sonar activo se basa en un proyector y un receptor para determinar el alcance, la demora y el movimiento relativo del objetivo. El proyector acústico genera una onda de sonido que se propaga hacia afuera y luego es reflejada por un objeto de destino. Luego, el receptor recoge y analiza esta señal reflejada.
Un ejemplo de SONAR activo son los barcos submarinos. Los submarinos transmiten energía acústica y descubren objetos en las cercanías a través del tiempo de retraso entre la adquisición del eco.
Además de poder detectar la presencia de un objeto, el surgimiento de herramientas modernas avanzadas nos permite determinar el tamaño, la orientación y la forma de un objeto con gran detalle.
Los ROV de Deep Trekker utilizan un sonar activo que envía una onda de sonido a una frecuencia particular y luego escucha cuánto tiempo tarda esa onda de sonido en regresar después de rebotar en objetos en el agua y el fondo marino. El sonar de imágenes multi haz utiliza múltiples haces de sonido para pintar una imagen de lo que está frente al ROV.
En escenarios de vigilancia, los sistemas utilizados son SONAR pasivo. En este caso, el método no necesita un transmisor local porque escucha las ondas transmitidas por otros dispositivos.
Esto significa que el dispositivo recopila los sonidos producidos por la vida marina, los barcos y otras superficies profundas. Sin embargo, las máquinas en un sistema pasivo no pueden determinar la ubicación de la fuente de sonido sin la ayuda de dispositivos de escucha. Deben trabajar juntos para determinar la ubicación del transmisor sin que se sepa su presencia. (en un entorno militar).
Pulso de radar de alta intensidad comprimido o herramienta de sonda CHIRP que se utiliza a menudo para el seguimiento del fondo y la búsqueda de peces. En lugar de hacer ping en una sola frecuencia como el sonar 2D tradicional, los dispositivos Chirping transmiten una amplia gama de frecuencias. Con cada pulso, el transductor comienza a vibrar a una frecuencia baja, que luego se modula hacia arriba a una frecuencia alta durante la duración del pulso.
La tecnología SONAR no es utilizada exclusivamente por los militares, así que echemos un vistazo a dónde más se utiliza.

By Navy photo by Photographer's Mate Airman Tina Lamb. [Public domain], via Wikimedia Commons
La tecnología de sonar se usa a menudo durante las misiones de búsqueda y rescate para que sea más fácil y eficiente localizar evidencia o víctimas de accidentes de navegación o posibles ahogamientos en aguas poco claras. SONAR también se usa regularmente en búsqueda y rescate. Los sistemas de escaneo lateral ayudan a localizar los cuerpos y guían a los buzos al lugar de la recuperación. Los ROV con sonares de imágenes ofrecen una alternativa segura para verificar y recuperar a la víctima en lugar de los buzos.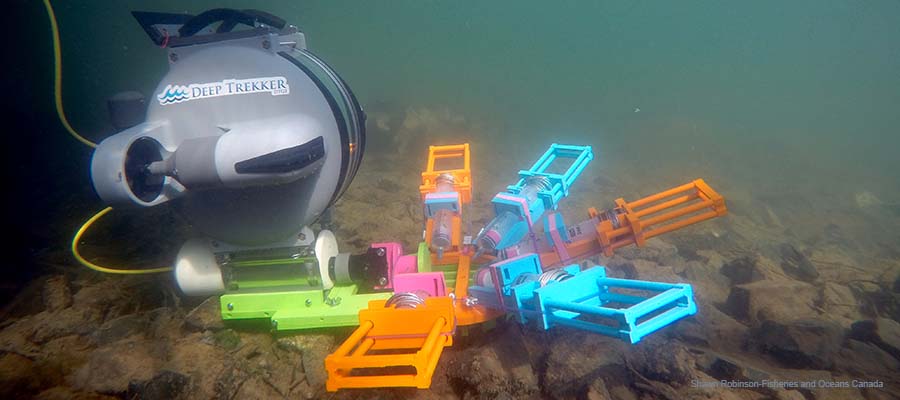
Finalmente, la adición de la tecnología de sonar es invaluable para el descubrimiento y la investigación submarina, ya que ayuda a los académicos e investigadores a monitorear la vida acuática o las condiciones ambientales debajo de la superficie.
Los sistemas de SONAR de barrido a menudo se definen por su haz de sonido en forma de abanico con un haz vertical angosto horizontal y ancho para reconocer la sección transversal en la acústica ambiental.
Si bien SONAR puede ser relativamente fácil de usar, es realmente una ciencia compleja. Es valioso comprender los detalles de la acústica para comprender completamente el concepto de sonar.
Al juntar la velocidad del sonido en el agua con el tiempo en que se recibió el reflejo, el sistema SONAR calcula la distancia que recorrió el sonido.
La pregunta para calcular la distancia acústica es:
Distancia = velocidad del sonido conocida en el agua x (retraso del sonido calculado al regresar / 2)
A partir de esto, podemos entender que la diferencia en la velocidad del sonido puede afectar drásticamente la precisión de la distancia a un objetivo. Por lo general, la velocidad del sonido en cuerpos de agua salada es de unos 1500 m/s. Sin embargo, este número varió según la profundidad operativa del sistema, la temperatura del agua y la salinidad.
Las calculadoras de velocidad del sonido pueden ayudar a obtener mejores aproximaciones en entornos operativos variables. Aunque los sistemas SONAR de exploración no tienen la capacidad de calcular con precisión la velocidad del sonido, los valores cambian en la pantalla para el entorno adecuado.
Los objetivos de SONAR con densidades de material concreto como rocas, metales, gas son bastante diferentes del agua, ya que tendrán poderosos ecos reflectantes. Los ecos de la arena, el barro, el lodo y las plantas no son tan potentes porque su densidad es similar a la del agua o porque absorben la energía del sonido.
La intensidad del eco se muestra en el dispositivo como un indicador brillante con colores vivos. En las paletas típicas, los colores brillantes representan ecos fuertes, los colores oscuros representan ecos débiles.
Cuando se visualiza cómo funciona el SONAR de exploración en términos de sonido, a menudo se les llama una linterna en una habitación oscura. Solo la zona iluminada por la luz queda sujeta a la visión del usuario, el resto permanecerá a oscuras.
En comparación con los haces de luz, los haces acústicos de SONAR tienen una altura y un ancho fijos, que es el patrón del haz. Es este haz acústico el que "ilumina" el lugar de agua objetivo con energía de sonido en lugar de energía de luz.
Los sistemas de SONAR de barrido suelen tener un haz horizontal angosto y un haz vertical ancho, lo que da como resultado un camino angosto para que la energía se transmita desde el transductor. Para representar la imagen de los objetos en el entorno, la cabeza del transductor dentro del SONAR girará con un motor paso a paso y luego moverá la cabeza en un arco para generar cortes del objeto en la pantalla.
Volviendo al ejemplo de la linterna, si toma fotografías del área mientras la luz recorre la habitación, tendrá partes de la habitación iluminadas. Como usuario, no verá toda la habitación iluminada, pero juntar los cortes le permitirá ver el área total iluminada.

Los objetos dentro de los patrones de haz del sistema SONAR se iluminan acústicamente y sus reflejos se reflejarán en el SONAR para su interpretación.
Los objetos fuera del patrón, por debajo, por fuera o por encima no aparecen en la pantalla del visor SONAR. Los sistemas de exploración SONAR no pueden determinar la diferencia entre objetos que tienen el mismo rango inclinado (ángulo de llegada vertical).
Por ejemplo, si dos objetos están en el mismo rango vertical frente al SONAR uno encima del otro, el SONAR mostrará los objetos como un solo objeto, aunque sea de una colección de sus ecos.
Las personas que busquen en el fondo de la masa de agua y entiendan que la intensidad de la señal disminuye a grandes distancias, pueden montar sus sistemas SONAR en ángulos específicos. Esto permitirá que las imágenes más claras del lecho marino estén sujetas a representación en la pantalla.
Si el sistema se inclina hacia abajo y tiene una altitud baja en una pendiente pronunciada, solo se presentará un área total estrecha en la pantalla. Al aumentar la altitud, el sistema SONAR iluminará una llanura más amplia del fondo del mar.
Cuando un operador busca objetos en el fondo del mar, los resultados óptimos de SONAR provendrán de la optimización de la altitud sobre el fondo con el sistema inclinado hacia abajo.
Esto proporcionará el mayor rango de imágenes para el fondo por la intensidad de la señal del sistema SONAR.
Tanto los sistemas SONAR mecánicos como los de barrido lateral pueden cubrir aproximadamente el 70% del lecho marino si el sistema tiene al menos un ángulo de 10 grados y una altitud de rango operativo del 10%.
Por ejemplo, en un rango de 10 metros, el sistema SONAR debe tener el 10% de eso como altitud. Eso es 1 metro sobre el fondo del mar. A 20 metros, la altitud debe ser de al menos 2 metros.
Esto se conoce como la regla del 10%. Hay otras "reglas" en el uso de la energía solar, pero esta es la más concreta de todas.
Una vez más, volviendo a la analogía de una linterna, se aplica cuando un SONAR localiza un objeto para determinar la forma, la orientación y la altura. Estos objetos tendrán una sombra acústica iluminada como si hubiera una luz visible brillando sobre ellos.
Si el sistema SONAR tiene un ángulo descendente pronunciado y una gran altitud, las sombras acústicas serán cortas. Las sombras cortas pueden ser difíciles de ver, lo que dificulta la evaluación del objeto. Si la altitud del sonar está cerca del fondo y el ángulo hacia abajo es poco profundo, las sombras proyectadas por los objetos serán similares.
Las sombras acústicas proyectadas por objetos lejanos son estrechas debido a la geometría angular del haz del sonar. El ancho de la sombra aumentará a medida que el sistema SONAR se acerque al objetivo. Con una sombra más ancha, puede ser difícil ver otros objetos en la sombra, porque no hay energía acústica dirigida hacia ellos.
Cuando hay muchos objetos en la misma área y están cubiertos por sombras, aumentar el ángulo y la altitud para producir sombras cortas ayudará a optimizar la distinción de objetos.
Como se demostró en partes anteriores de este artículo, el sistema SONAR suele iluminar los objetos desde un ángel. Por lo tanto, solo las superficies y los bordes cercanos al sistema serán objeto de visualización.
La superficie del objeto que es perpendicular al sistema dará como resultado los ecos más fuertes. Mientras que las superficies con ángulos óptimos harán que las ondas acústicas se reflejen en el sistema, dando malos resultados.
Todos estos principios acústicos se aplican a entornos grandes. Por ejemplo, al ver cascos de barcos y dedos de muelle en el agua, el brillo devolverá las características de los objetos en la línea de visión. Las áreas ocultas de los retornos de eco se verán como áreas sin retorno o como sombras.
Incluso con el perfil único de interpretación acústica, los sistemas SONAR pueden ser muy valiosos cuando se montan con un ROV. Sin un sistema SONAR, el piloto del ROV tendrá que confiar en la transmisión visual de los objetos y características a través de una cámara. En entornos de baja visibilidad, puede ser difícil ver, ya que el alcance suele ser inferior a un metro.
Los sistemas SONAR aumentarán drásticamente este rango, lo que permitirá al piloto detectar objetos desde más lejos. En lugar de recorrer el lecho marino para encontrar objetos, el ROV puede permanecer estacionario y escanear todo el entorno. Luego, el piloto puede comprender el área con los objetos hechos por el hombre, las superficies naturales y las áreas para ignorar.
Debido a que los ROV tienen una masa baja, el movimiento innecesario es común tanto en el plano vertical como en el horizontal. Para los sistemas SONAR, la imagen se desarrolla a medida que el transductor gira sobre el eje del punto central. Si el ROV se mueve debido al entorno o a la entrada del piloto antes de la adquisición de la imagen, el resultado puede verse borroso.
En estos casos, podría ser mejor estrechar la exploración del plano o colocar el ROV en la parte inferior para inducir una frecuencia de actualización más rápida para que el ROV gire sobre el eje. Además, cuando se observa un ángulo de visualización del objeto, se deben conocer los rumbos relativos donde el objeto está sujeto a la lectura como un ángulo en el sentido de las agujas del reloj desde 000 grados R.

Encontrar objetivos en la columna de agua o en el fondo del mar es otra forma de usar SONAR, además de la navegación. Aprender a usar el sistema SONAR para encontrar objetos requiere práctica porque los objetos pequeños son mucho más difíciles de encontrar.
La clave para hacer esto con un ROV es girar lentamente y maniobrar para permitir que las nuevas imágenes se generen sin manchas. Primero, el ROV debe colocarse en el fondo o en una posición estable.
A continuación, un escaneo polar está sujeto a iniciación completa. Después de esto, se produce el cálculo del rumbo relativo al objeto. Para continuar, el ROV se gira para alinearse con el objeto en un rumbo cero.
Más adelante, el escaneo de sector está sujeto a uso para reducir la imagen a unos 90 grados en aras de una frecuencia de actualización más rápida. Y finalmente, el contacto permanece con el objetivo usando SONAR mientras el ROV sigue al objetivo.
Los sonares de imágenes 2D son una excelente opción para muchas aplicaciones, como se mencionó. El envío de cientos de haces en una banda horizontal de 120 grados y una banda vertical de 20 grados permite obtener una mejor calidad de imagen que un sonar de barrido sectorial de un solo haz. Este es el tipo de sonar utilizado en el video de inspección del canal en la parte superior, así como en este video de inspección del túnel aquí.
Ahora que sabe qué son los sistemas SONAR y para qué se utilizan, está mucho más cerca de decidir si desea utilizar SONAR para sus propias necesidades. En cualquier caso, no hay prisa por esto y es aún mejor si investigas un poco más.

Hay muchos tipos de sistemas SONAR, integrados con una variedad de herramientas, software, robots y vehículos. Debido a que SONAR puede estar sujeto a uso en energía, infraestructura, defensa, buceo comercial, municipios, marítimo, defensa, ciencias oceánicas y descubrimiento submarino, solo es mejor si comprende en qué se está metiendo.
Si está interesado en obtener más información sobre SONAR o desea consultar sobre el sistema adecuado para usted, comuníquese con nosotros y con gusto atenderemos sus necesidades.
Deep Trekker ofrece vehículos operados a distancia (ROV) equipados con cámaras que se utilizan ampliamente para tareas como inspecciones submarinas, grabación de video, operaciones de mantenimiento y reparación.
Al agregar el accesorio opcional TriTech Micron o el TriTech Gemini 720is Multibeam Imaging Sonar, obtiene el beneficio del escaneo operado a distancia que mejorará significativamente la capacidad de su ROV para identificar objetos ocultos que de otro modo podrían pasar desapercibidos por un sistema de cámara. Estos archivos adjuntos permiten capacidades de escaneo lateral y frontal. TriTech International Limited es un diseñador, fabricante e integrador líder a nivel mundial de equipos de imágenes submarinas confiables y de alta precisión que se considera ampliamente como el estándar de la industria.